Sample Changer
This page describes the basic operation of the FlexHCD sample changer on ID23-2. For troubleshooting see here. A very brief description of the puck loading procedure is as follows (remember - only Unipucks and spine caps on ID23-2!):
1)Enter the hutch and press the green loading button

2)Select the desired cell by clicking on it in the flex software using the track pad
3)Thread the tip of the white plastic plunger into the desired puck, using the tongs to prevent rotation
4)Place the puck with notch oriented outward in the proper position. IT should sit perfectly flat (tip: look at the plunger from the side to confirm that there is no angle)

5)Press the plunger to remove the puck cover
for more information, see below.
The FlexHCD
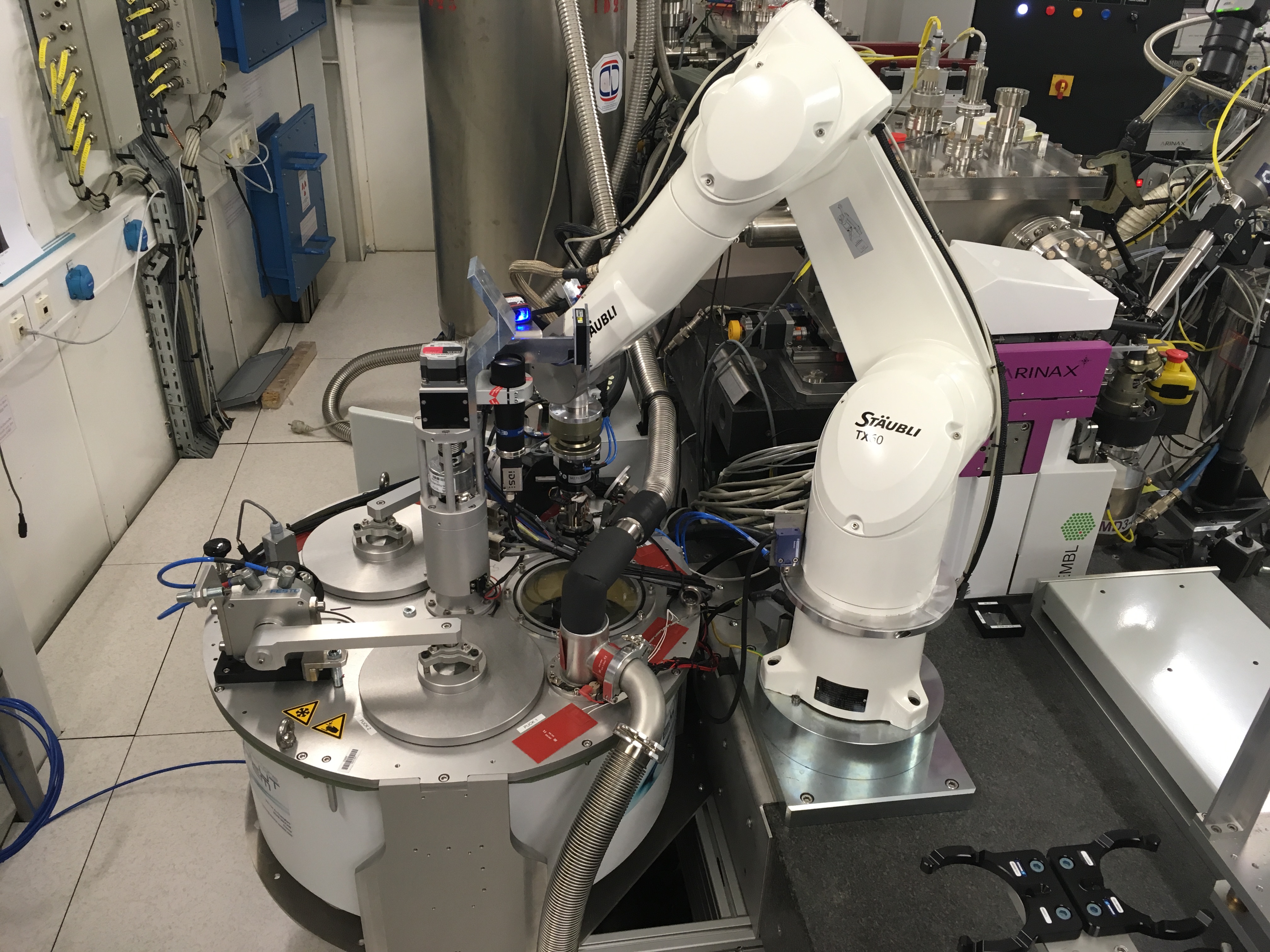
The FlexHCD (High Capacity Dewar) is a new sample changer robot that has replaced the old SC3s and is now installed on all ESRF MX beamlines, with a modified version on MASSIF-1. The dewar is organized in 8 Cells, each containing 3 slots for pucks (except 8-3 which is reserved for recovered samples).
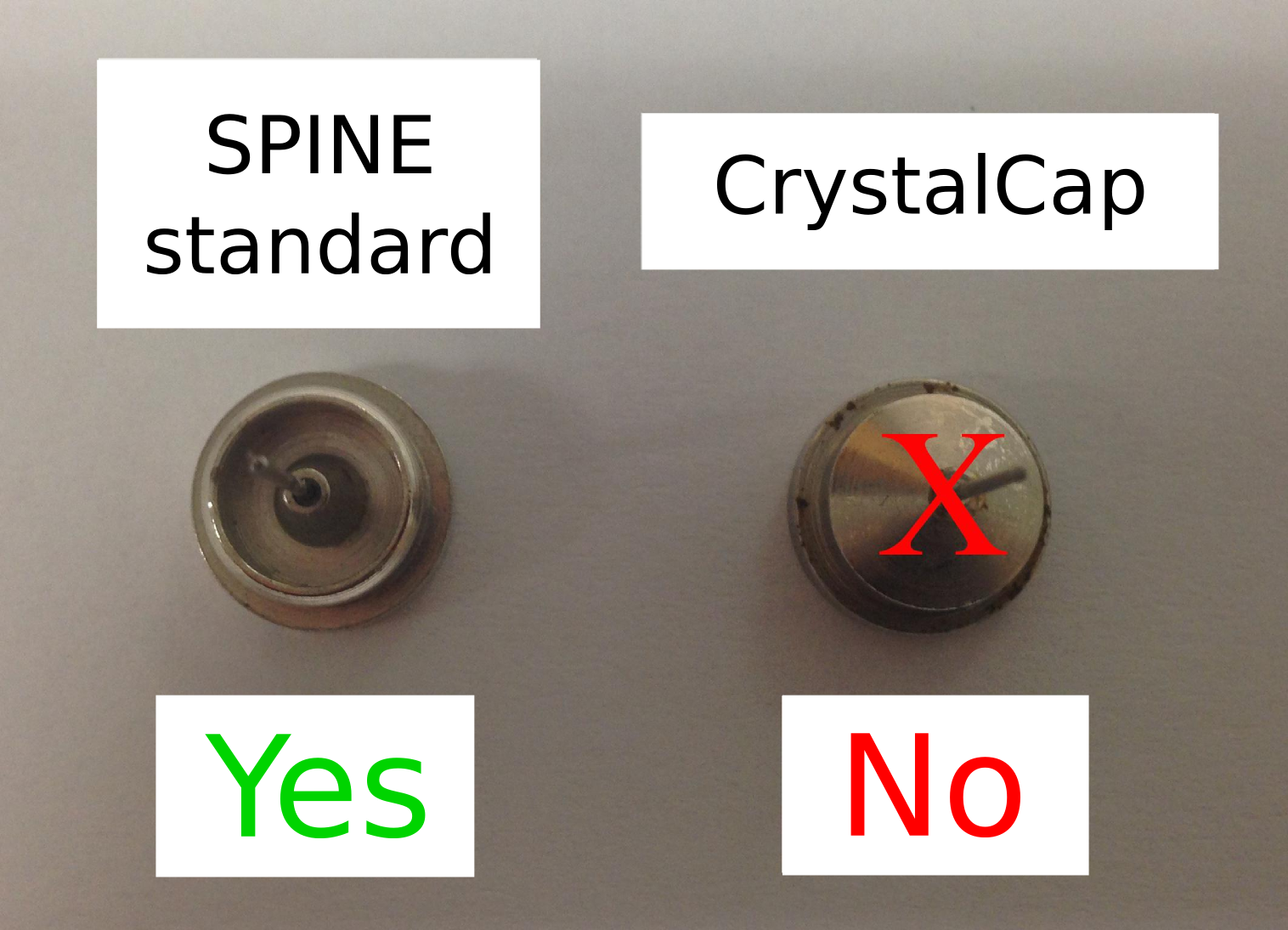
On ID23-2, the sample changer is only compatible with Unipucks containing SPINE caps.
All other caps are explicitly forbidden!
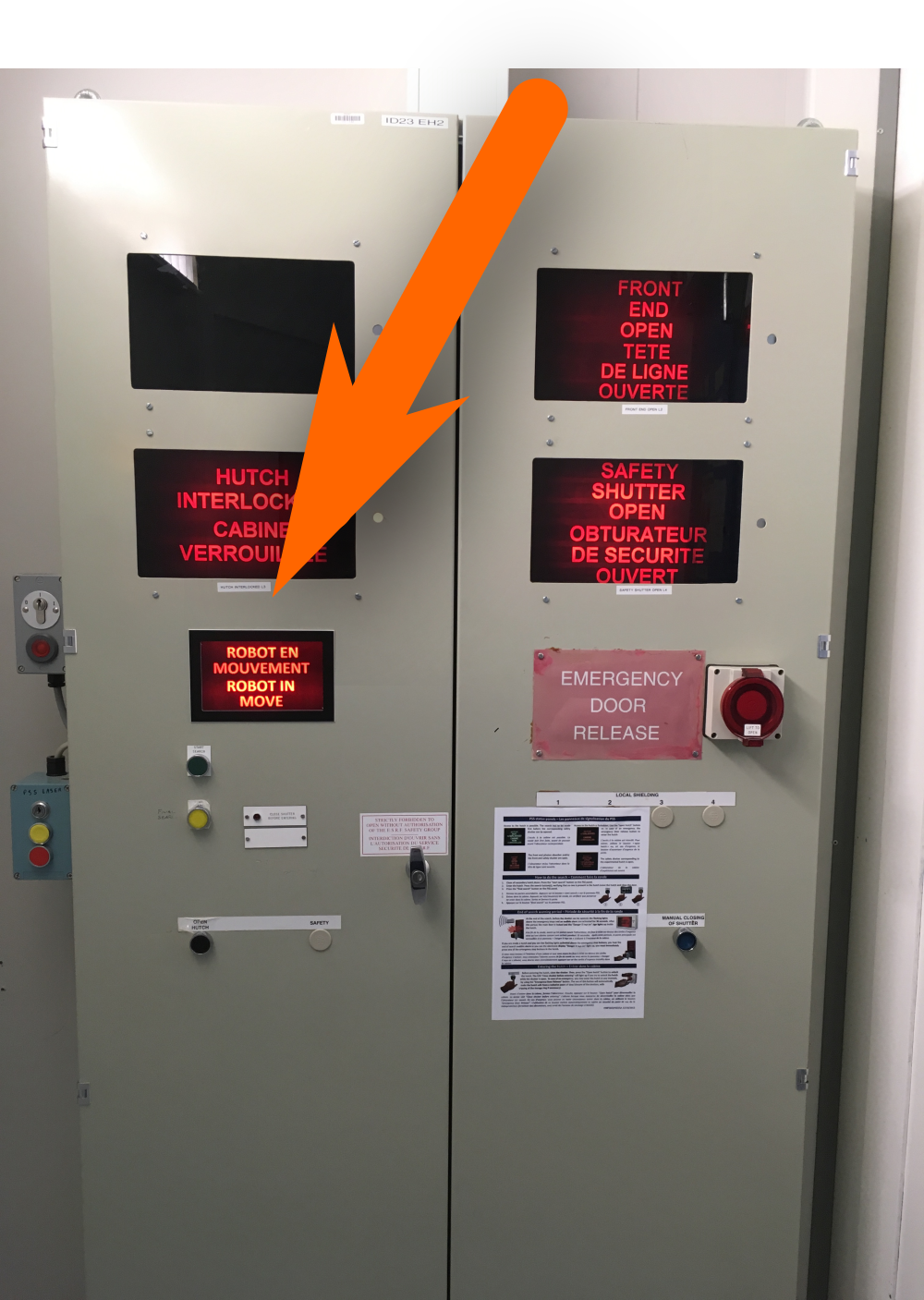
For safety reasons the sample changer robot is interlocked with the doors of the experimental hutch. In case the interlock is broken any robot movement will be stopped immideately. Please make sure that any robot operation is finished and that the robot arm has reached its safe position before opening the doors on the PSS panel.
How to identify if the robot is still moving:
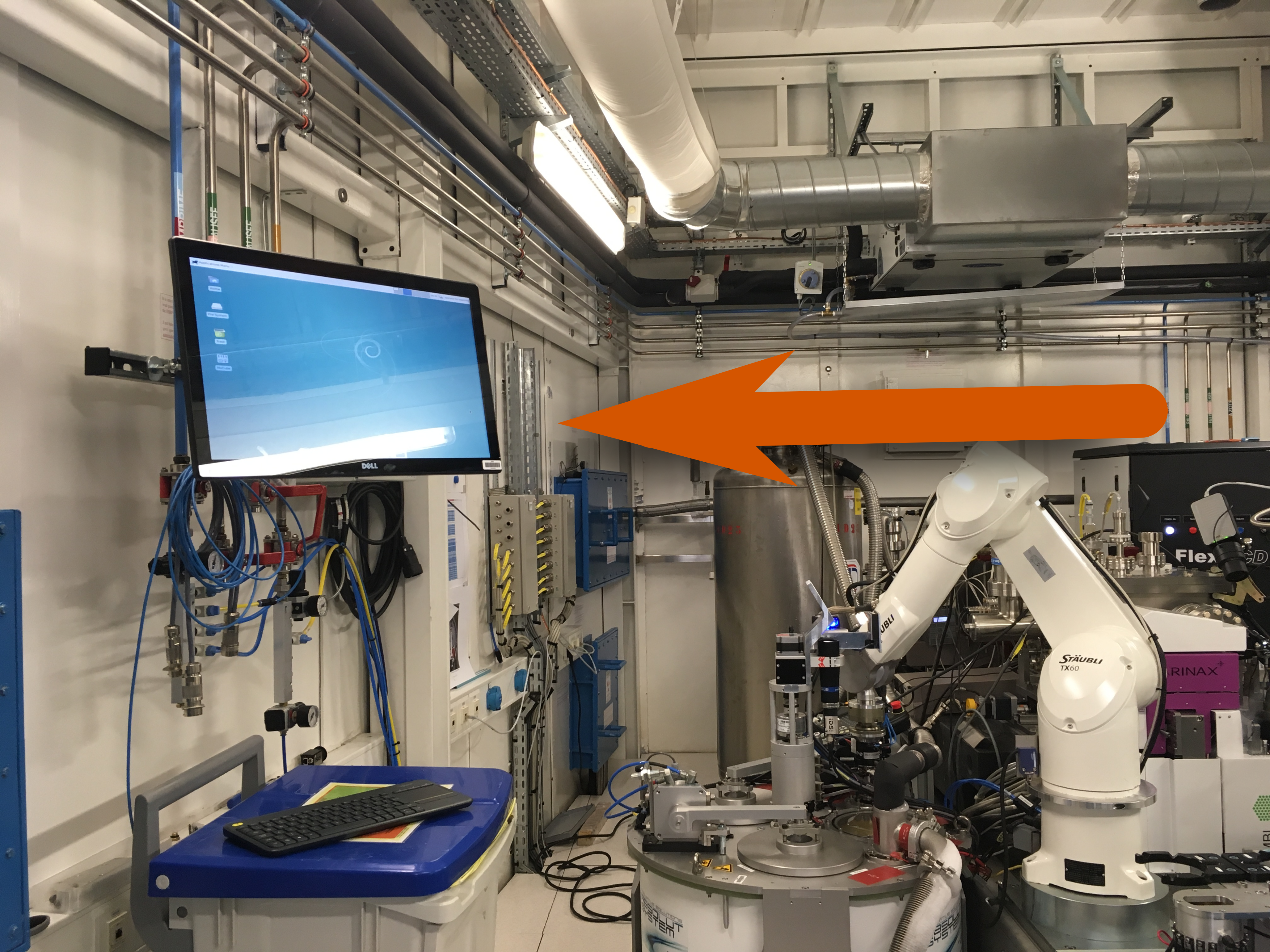
- EH camera: The screen mounted on the wall above the screens of the control computershows a camera image of the experimental hutch , if the robot is not fully visible it is possible to navigate by mouse.
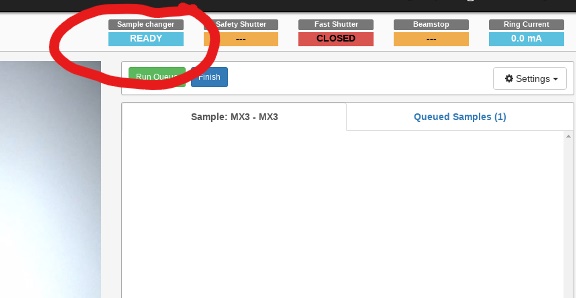
- MXCube: The "Sample changer" status is "Moving"
- PSS panel: a panel on the PSS ouside the experimental hutch is flashing during robot operation:
FlexHCD - MXCuBE2
FlexHCD is completely operated from MXCuBE2 interface. By right click on the sample entry in the queue on the left side of the MXCube window samples can be loaded or unloaded, respectively. Further functionality is described in the troubleshooting section.
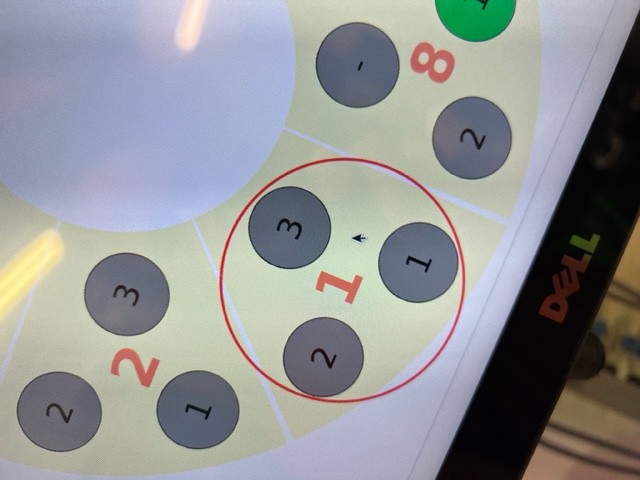
Basket Loading
The dewar can be accessed by a dedicated MXCube running on the screen on the left side of the experimental hutch, use the bluetooth keyboard to navigate:
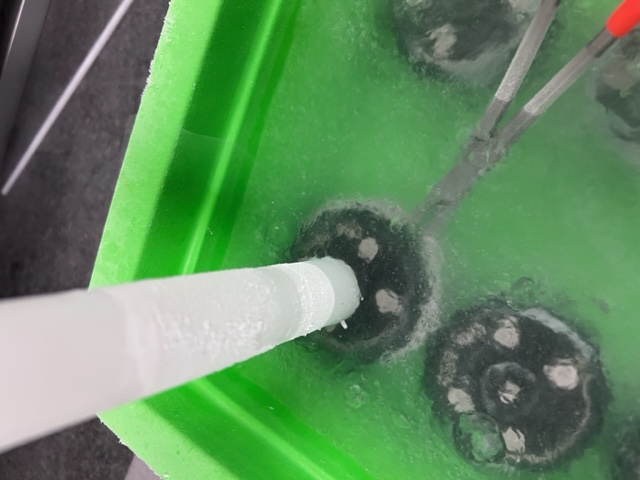
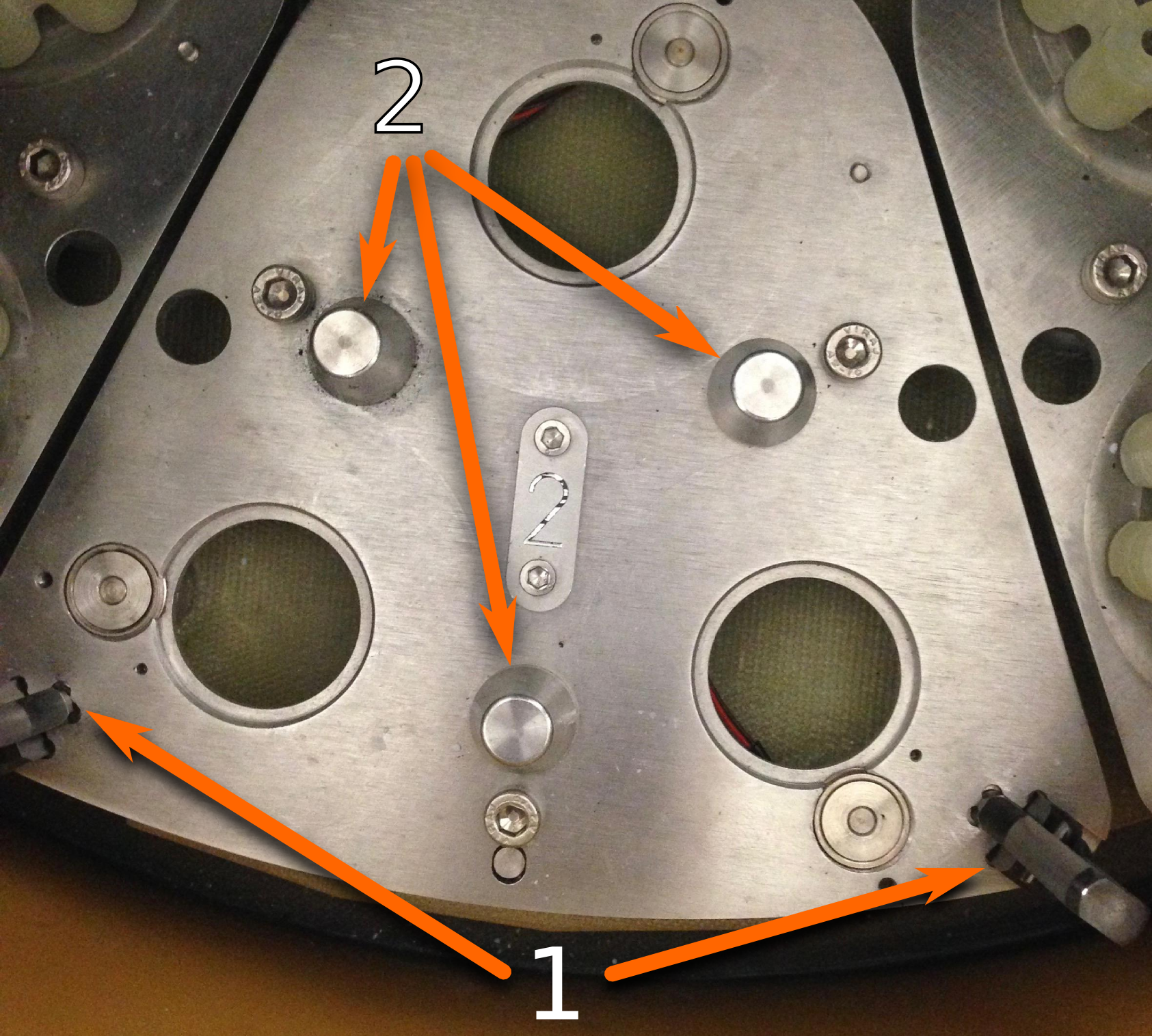
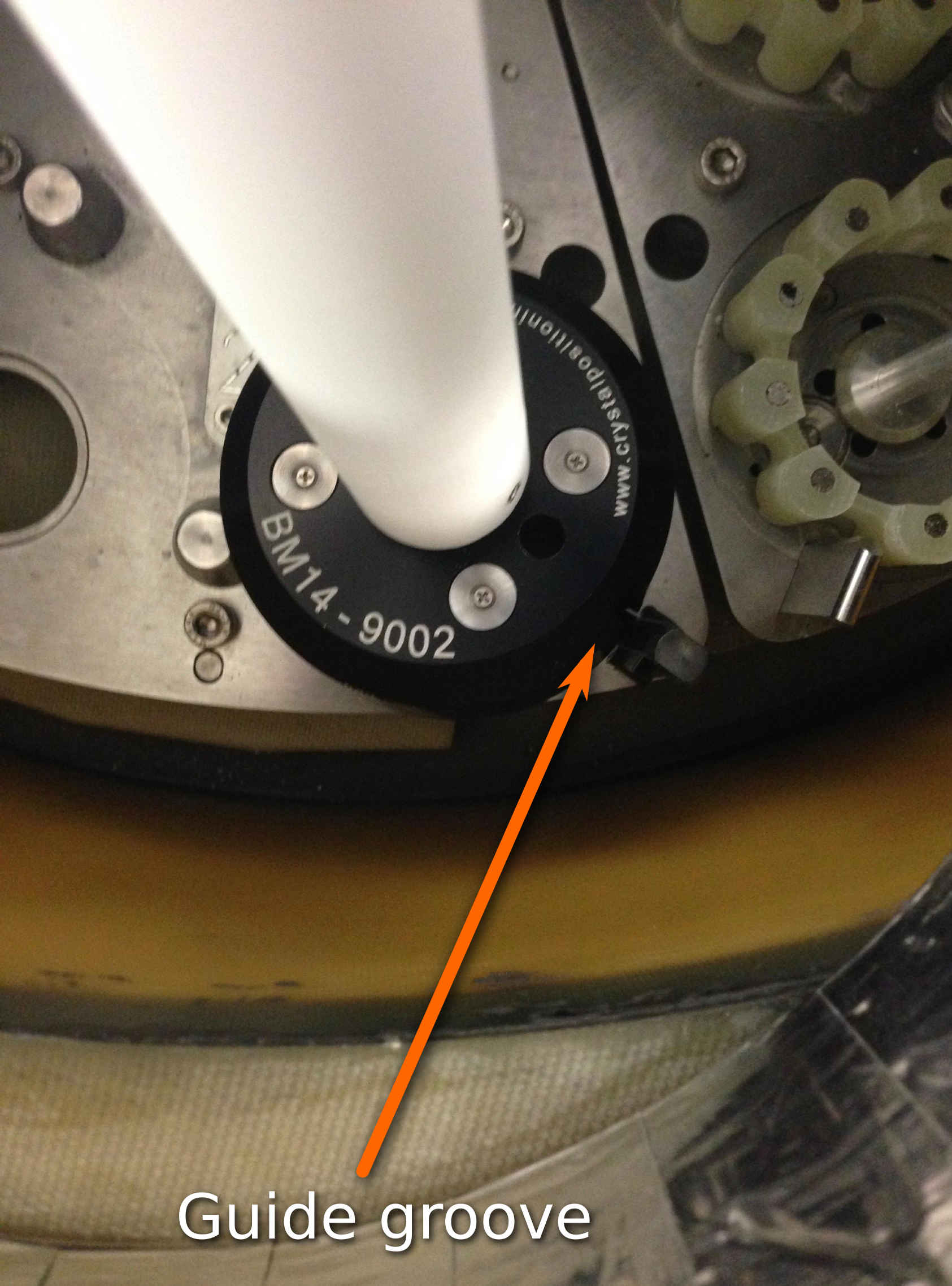
To facilitate the loading procedure each position in the FlexHCD dewar has a guiding finger (1) to be aligned with the unipuck groove. Additionally, the puck alignment aids (2) help to put the puck in place correctly:
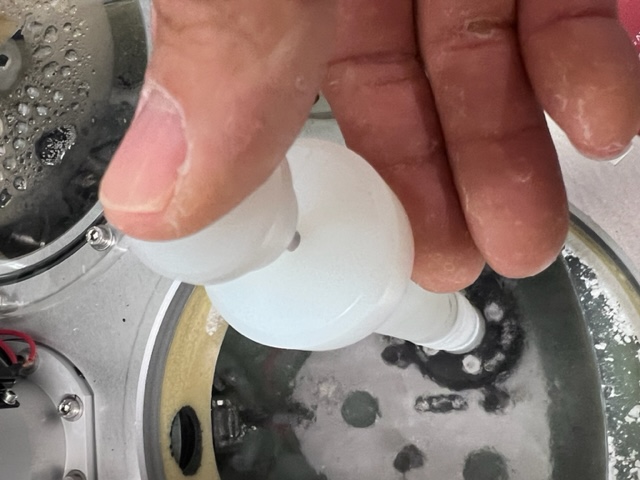
Screw the unipuck loading tool into the top part of the enclosure:

Place the unipuck between the alignment aids and use the guide finger and the puck groove for correct positioning:
Push down the metal rod on the unipuck loading tool to release the base:

partners



European Synchrotron Radiation Facility - 71, avenue des Martyrs, CS 40220, 38043 Grenoble Cedex 9, France.