- Home
- Users & Science
- Scientific Documentation
- ESRF Highlights
- ESRF Highlights 2016
- Enabling technologies
- Simulating the control system of the EBS
Simulating the control system of the EBS
A simulator has been built to aid in the programming and testing of the future EBS accelerator complex and to perform beam dynamics studies. Already this system is proving useful for the visualisation of feedback from various components of the system.
The control system is an essential component of a particle accelerator complex such as the ESRF-EBS. A new control system has to be ready and working from day one even though most of the equipment will only be assembled and installed during the long shutdown in 2019. To facilitate the construction of the control system, a virtual ESRF-EBS has to be built before it is physically available. This is the purpose of the ESRF-EBS simulator, which will aid our development of graphical user interface (GUI) applications required to control the ESRF-EBS. It will also help us to prepare all components of the interface for day 1 to manage the large number of devices (power supplies, beam position monitors, etc.) of the EBS. Simulating the ESRF-EBS will help us to decide on device hierarchies and to develop the interfaces that permit the machine physicists to control the equipment.
The simulator is split into two parts: the physics simulation, and the Tango devices (Tango is an open source controls toolkit that originated from the ESRF). The physics simulation is done by the Accelerator Toolbox, which is an open source Matlab layer originating from SLAC and now developed by the ESRF. Its role is the computation of the beam propagation around the ring including the computation of its main parameters including the beam positions, tunes and chromaticities. Within Accelerator Toolbox, it is possible to change the values of a huge number of parameters. Within the control system simulator, only the parameters corresponding to modifiable physical values in the real machine (like power supply current) are handled and made available via a set of Tango devices. The Tango devices have a user interface as close as possible to the real hardware interface. However, instead of sending their requests to any kind of hardware, they change the corresponding parameters in the Accelerator Toolbox definition of the EBS ring.
The simulator could be seen as an infinite loop with three actions which are: first updating the definition of the EBS ring in the Matlab Accelerator Toolbox according to the Tango device servers controlling the machine equipment, then computing the new ring optics, and finally distributing the new beam properties to Tango devices simulating beam diagnostics equipment. A dedicated Tango control system has been set up to handle this simulator. Today, around 2300 devices have been declared. Following the requirements of the accelerator physicists, the simulator has enabled the definition of a new way to control the numerous EBS power supplies. Even if control by current will obviously still be possible, a control by “strength” has been added.
In terms of beam dynamics studies, the simulator is extremely useful for studying the beam behaviour in various conditions and also for preparing and testing the software tools necessary for the commissioning of the new ring. Though the response time of the simulator is much longer than the response of a real machine, it is short enough to be transparent for human perception or for most automated tuning sequences. Work has now started on tools like beam steering along the first turn in the ring, orbit response matrix measurements, optics correction for the modulation of beta-functions or horizontal/vertical coupling, sextupole tuning, etc. The tools developed from now on will run without any modification on the real control system when it is available. Until then, the accelerator model will be improved with any newly available information (for example, magnet calibration), and the interface to the device servers may be updated when needed. In the longer term, the simulator can be kept running in parallel with the real machine, since if the measurable beam parameters are validated with measured values, it can give access to many other parameters which cannot be measured.
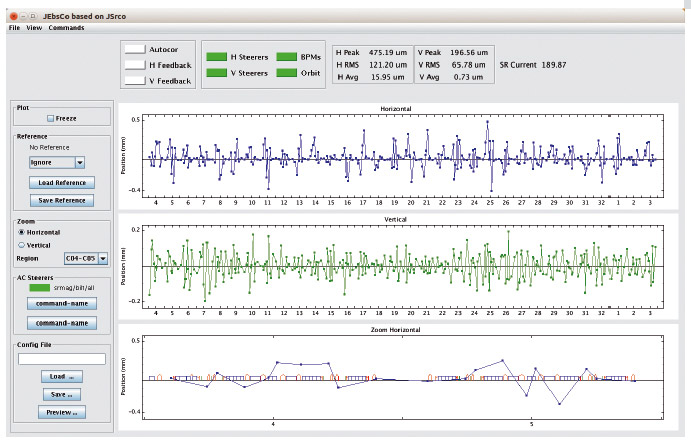
As an example, the simulator enabled us to develop the software loop controlling the slow orbit correction, using 320 beam position monitors and 288 steering magnets. It is already running today, three years before its production debut. Thanks to the simulator, it was even possible to develop a prototype of the graphical application which will be used in the control room to display the EBS beam orbit and to control the slow orbit correction loop (see Figure 151).
 |
|
Fig. 151: Prototype graphical application for the EBS beam orbit. |
To conclude, even if the simulator is not yet complete (for instance, all vacuum related equipment is still missing), it has already proven to be a very fruitful tool in enabling us to work on the different aspects of the EBS control system before the first magnet is connected to any power supply.
Authors
E. Taurel and L. Farvacque.
ESRF
partners



European Synchrotron Radiation Facility - 71, avenue des Martyrs, CS 40220, 38043 Grenoble Cedex 9, France.